NAO
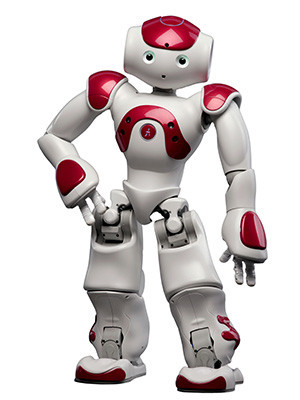
Nao is an autonomous, programmable humanoid robot developed by Aldebaran Robotics. It was built in NAOqi 2.0, Linux-based OS, and is compatible with various OS, windows, Mac OS and Linux. Nao uses two HD cameras, four microphones, a sonar rangefinder, two infrared emitters and recivers, an inertial borad, nine tactile sensors, and eight pressure sensors as detectors for surroundings.
Zortrax M200

Zortrax M200 is a FDM type 3D printer. It can be used to make various objects which have complicate shapes. It has an automated platform leveling system which make calibrating easy. The printer is optimized to print with ABS.
Phantom 4

The DJI Phantom 4 is one of the most advanced quadcopter with well made hardware. In addition to its built-in sensors and cameras, the quadcopter itself is easy to control and offers much functionality. The quadcopter will be used as a testbed in iSystems lab for
- SLAM(Simultaneous Localization and Mapping)
- Motion planning
- Computer vision
- Autonomous system
- Adaptive control scheme
AR Drone 2.0

The Parrot AR Drone 2.0 is a quadcopter that is lifted and propelled by four rotors. This model is one of the most used quadcopters due to its simple development environment. The quadcopter will be used as a testbed in iSystems lab for
- Image tracking
- Motion planning
- Obstacle avoidance
- Autonomous system
- Adaptive control scheme
Bebop Drone

The Parrot Bebop is a small sized quadcopter with a powerful camera. Due to its built-in fish-eye camera, the quacopter is specialized in image processing and computer vision. The quadcopter will be used as a testbed in iSystems lab for
- Pattern recognition
- Motion planning
- Computer vision
- Image-based diagnosis
Hornet 460

Hornet 460 is a quadcopter that is lifted and propelled by four rotors. The quadcopter will be used as a testbed in iSystems lab for
- Autonomous system
- Motion planning
- Obstacle avoidance
- Reconfigurable system
- Adaptive control scheme
NI CompactDAQ Systems
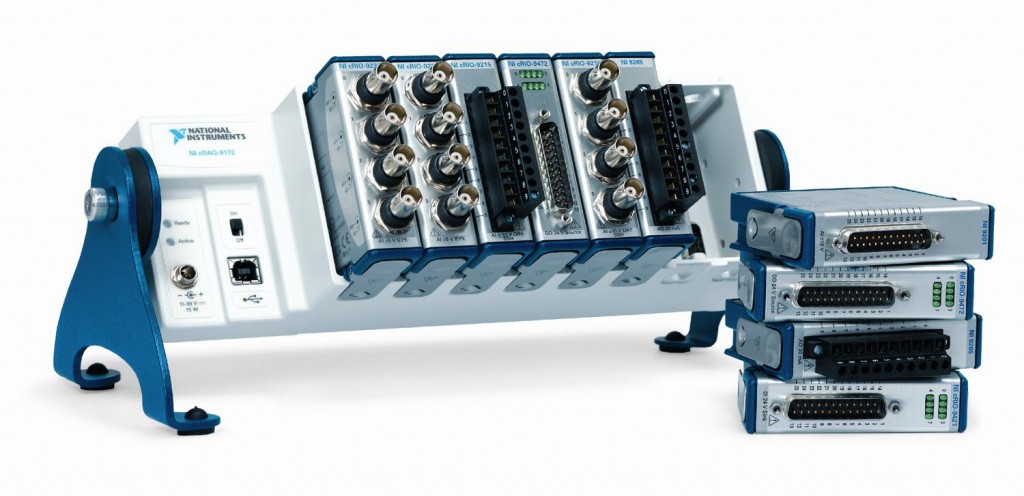
NI CompactDAQ is a portable, rugged data acquisition platform that integrates connectivity and signal conditioning into modular I/O for directly interfacing to any sensor or signal. Use NI CompactDAQ with NI LabVIEW software to customize how you acquire, analyze, present, and manage your measurement data.
Rotor Test Station
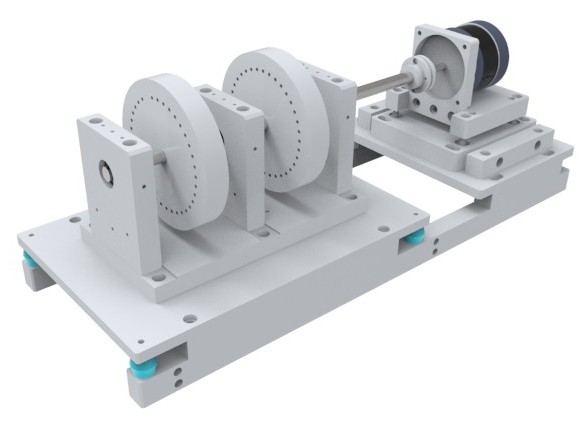
Rotor kits as a rotating machinery diagnostic testbed for bearing and shaft faults.
- rotor unbalance
- shaft misalignment
- bearing crack
- rubbing
High Speed Camera

- Fault Diagnostics with vision information
- 800 x 600 pixels and control to 1000 fps.
- Max speed at resolution of 800 x 600 is 1260 fps
FILR Thermal Camera Image

- Machine Fault Diagnosis with thermal images
- Discover overheated bearings or machine components
- Take accurate temperature measurements from a safe distance
XY Plotter
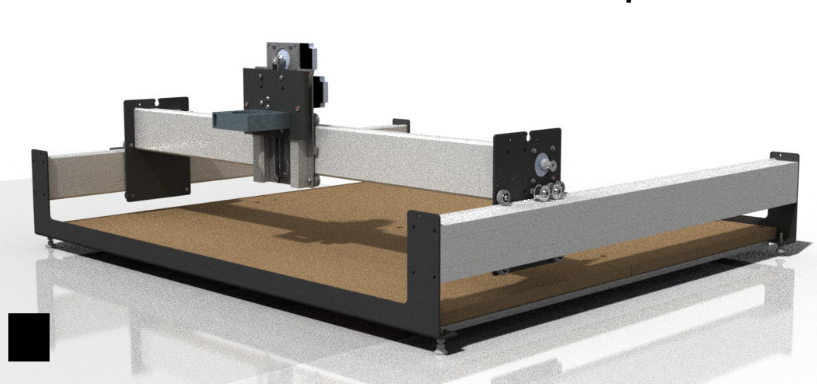
This is the Shapeoko Kit, a desktop, 3-axis CNC Machine kit that allows you to create your 2D and 3D designs out of non-ferrous metals, hardwoods, and plastics.
Linear Stage Slide System
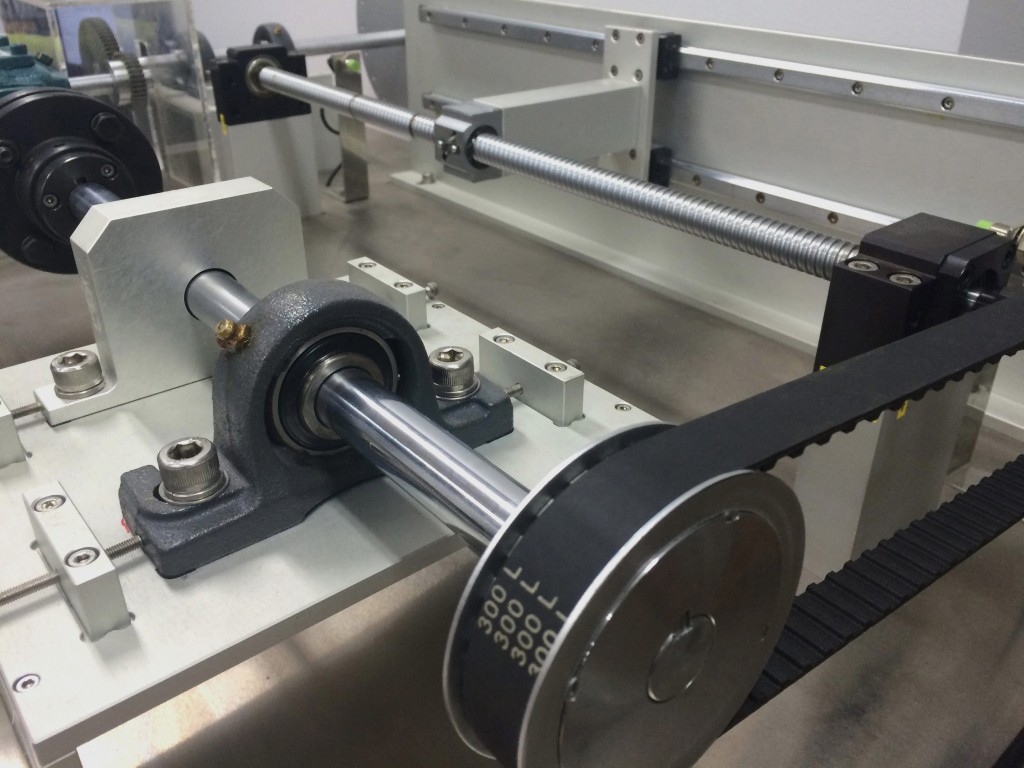
The linear stage slide system is often used in manufacturing equipment. Failure monitoring in such systems can be researched with this linear slide testbed in a lab environment.
Dobot

Dobot is a four axis robotic arm designed for Makers, artists, educators, and scientists. The high quality aluminum frame provides stability and the Arduino-controlled stepper motors provide precision and accuracy.
The arm can be controlled with Bluetooth via a smartphone app or PC. There is a control rig to allow Dobot to follow the motion of your hand, and it can recognize objects via a web camera.
Robot Arm

A 4-axis parallel-mechanism robot arm, inspired by the ABB PalletPack industrial robot arm. It is made up of laser cut acrylic or wood parts, powered by standard servo motors, and controlled by an Arduino-compatible board. With a parallel-mechanism robot arm, most of the masses concentrate on the base which makes the robot much more stable and allows the upper Arm to react fast.
NI Mobile Robot
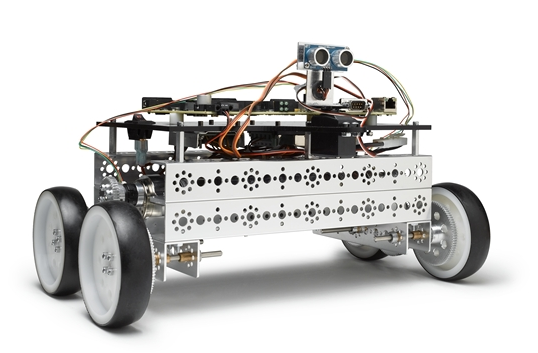
Mobile robots have the capability to move around in their environment and are not fixed to one physical location. NI mobile robot perform on-board image processing and obstacle avoidance with sensors.
- Motion Control/Locomotion
- Perception
- Localization
- Cognition/Path Planning
Leap-motion

The Leap Motion controller senses how you naturally move your hands and lets you use your computer in an interactive way.
- Interactive Design with computer and human
- Physical computing
- Signal processing & sensor
Kinect

Kinect is motion sensing input devices which enable us to control and interact with computer through natural user gestures.
- Interactive Design
- Image processing
- Entertainment
- Education
Measurement Equipment

Measurement instruments and equipment to listen to machine’s heart beat